Le prototype de radar sonore Hydre mis au point par Bruitparif aux fins de contrôle-sanction des véhicules excessivement bruyants
4/12/2024
L’association Bruitparif a mis au point un radar sonore dénommé « Hydre » à visée de contrôle-sanction des véhicules émettant un bruit excessif. Ce radar de bruit est conçu pour détecter automatiquement les véhicules excessivement bruyants et permettre aux collectivités d’émettre des amendes pour lutter contre les nuisances sonores.
Avec ce radar sonore breveté et récompensé au concours des décibels d’Or 2024, Bruitparif participe actuellement à l’expérimentation nationale prévue par l’article 92 de la loi d’orientation des mobilités (LOM), ainsi qu’à des expérimentations menées dans d’autres villes en Europe (Berlin, Bruxelles, Barcelone, Genève et Bâle).

Photographie du prototype de radar sonore « Hydre » conçu et mis au point par Bruitparif et dont le premier exemplaire a été installé le long de la RD46 à Saint-Lambert-des-Bois le 3 janvier 2022
expérimentation nationale
La mise au point par Bruitparif de son prototype de radar sonore à visée de contrôle-sanction s’intègre dans la dynamique d’expérimentation lancée au niveau national en application du cinquième alinéa de l’article L. 130-9 du code de la route, créé par l’article 92 de la loi n°2019-1428 du 24 décembre 2019 d’orientation des mobilités.
Le Ministère de la Transition écologique a procédé entre 2020 et 2022 à une phase d’identification des solutions techniques qui pourraient être retenues en vue de la mise au point de prototypes d’appareils de contrôle automatique des niveaux d’émissions sonores des véhicules. À l’issue de cette période qui a comporté des tests réalisés sur piste d’essai, il a sélectionné trois fabricants (dont Bruitparif) pour participer à l’expérimentation des solutions en conditions réelles de circulation.
Cette expérimentation a démarré officiellement le 4 janvier 2022 suite à la publication au Journal Officiel du décret n 2022-1 du 3 janvier 2022. Elle est conduite au sein de 7 collectivités pilotes (Communauté de communes de la Haute Vallée de Chevreuse, Paris, Rueil-Malmaison, Villeneuve-le-Roi, Nice, Bron, Toulouse).
L’expérimentation se déroule en deux phases.
La première phase de l’expérimentation a démarré début janvier 2022 et s’est achevée en octobre 2022. Il s’agissait d’une phase de tests « à blanc » sans constatation d’infraction ni de verbalisation. Les données collectées par les radars sonores ont été télétransmises sur les serveurs sécurisés du Cerema aux fins d’étude et d’analyse de la performance des systèmes. À l’issue de cette première phase, deux fabricants dont Bruitparif ont décidé de poursuivre et de travailler à faire homologuer leur appareil auprès du Laboratoire national de métrologie et d’essais (LNE).
La seconde phase d’expérimentation, avec verbalisation, débutera pour sa part, une fois les dispositifs de radars sonores homologués. La date prévisionnelle de démarrage se situe au printemps 2025. Les dossiers comportant les éléments constitutifs d’une infraction préparés par les radars sonores seront alors télétransmis aux centres habilités pour constater les infractions au sein des territoires pilotes participant à l’expérimentation. L’infraction sera alors sanctionnée d'une contravention de 4ème classe, comme prévu par l’article R318-3 du code de la route. Cela correspond à une amende forfaitaire de 135€, minorée à 90€ en cas de paiement dans les 15 jours.
À l’issue de l’expérimentation (probablement fin 2025), une évaluation et un bilan seront dressés par le Ministère de la Transition écologique. S’ils s’avèrent concluants, les radars sonores pourront alors être déployés plus largement en France.

Vue du radar sonore « Hydre » en situation cible à terme (montage photo)
Les sites d’expÉrimentation du radar sonore Hydre en france
Pour la première phase d’expérimentation, trois exemplaires du radar sonore Hydre ont été déployés, tous en Île-de-France :
- Le long de la RD46 à Saint-Lambert-des-Bois en Vallée de Chevreuse (78), site retenu pour effectuer une inter-comparaison des technologies proposées par les trois fabricants sélectionnés par le Ministère.
- Le long de la RD5 (cours de Verdun) à Villeneuve-le-Roi (94).
- Rue d’Avron dans le 20ème arrondissement de Paris.

Le radar sonore Hydre installé sur trois sites pilote rue d’Avron à Paris 20ème (à gauche), le long de la RD5 à Villeneuve-le-Roi (au milieu) et le long de la RD46 à Saint-Lambert des Bois en Vallée de Chevreuse (à droite) lors de la première phase d’expérimentation.
Pour la seconde phase, cinq sites en France seront équipés d’Hydre : les trois précédemment cités au sein des villes de Paris (75), Villeneuve-le-Roi (94) et en Vallée de Chevreuse (78) ainsi qu’un site à Rueil-Malmaison (92) en Île-de-France et un site à Toulouse (31).
Description du systÈme
Le radar sonore « Hydre » de Bruitparif se compose principalement des éléments suivants :
- Deux dispositifs acoustiques « Méduse » composés chacun de quatre microphones, capables de calculer des niveaux sonores et des angles de provenance du bruit.
- Une caméra grand angle (180°) dont l’objet est de réaliser une photo de la scène complète au moment de la potentielle infraction.
- Deux caméras dédiées à la lecture automatisée de plaque d’immatriculation (LAPI) par l’avant et par l’arrière du véhicule ou dans chaque sens de passage.
L’ensemble des composants est hébergé au sein d’une structure métallique qui contient également l’unité centrale de traitement et de télétransmission sécurisée et chiffrée des données.
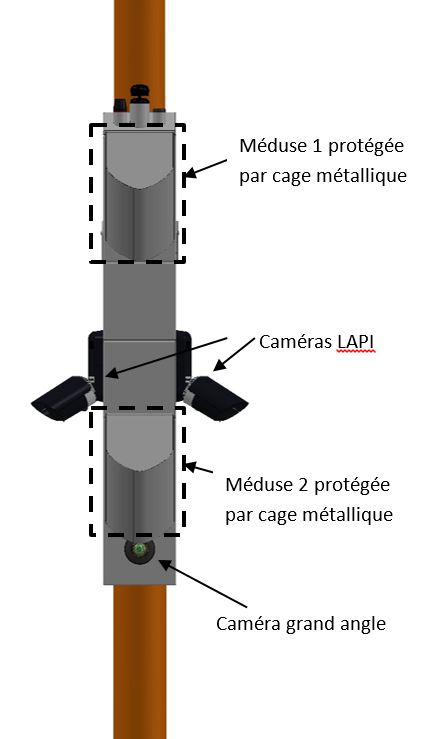
Schéma de principe du radar sonore « Hydre »
Principe de fonctionnement
Le premier traitement consiste à croiser les informations collectées par les deux dispositifs « Méduse » pour déterminer à chaque instant, le niveau sonore produit par le véhicule le plus bruyant dans la scène et sa position. La capacité à mesurer précisément à quelle distance se trouve la source de bruit est cruciale car elle permet de compenser l’effet d’atténuation du bruit en fonction de la distance. Il est ainsi possible de calculer le niveau de bruit du véhicule à une distance de référence fixée à 7,6 mètres (par cohérence avec les conditions d’homologation sonore des véhicules). Ceci permet de traiter à égalité tous les véhicules quelles que soient les trajectoires qu’ils empruntent sur les voies.
Lorsque le niveau sonore ainsi recalé dépasse le seuil de déclenchement retenu (ce dernier n’est pas encore connu et devrait être fixé prochainement par arrêté ministériel), et si les conditions environnementales sont réunies, un dossier d’infraction potentielle est ouvert au sein de l’appareil.
Le traitement récupère alors auprès de la caméra grand angle quelques secondes de vidéo avant et après l’instant considéré comme le plus significatif de l’infraction potentielle et sélectionne l’image de contexte à ajouter au dossier. Cette dernière fait figurer un cadre autour du véhicule identifié ainsi qu’un point à l’endroit de la source émettrice de bruit, ce qui matérialise le fait que c’est bien ce véhicule qui est en cause (voir exemple dans photo ci-après).
Le traitement interroge ensuite les caméras LAPI afin de récupérer l’image du véhicule concerné ainsi que le numéro de sa plaque d’immatriculation. L’ensemble de ces éléments sont ajoutés au dossier d’infraction potentielle, qui peut alors être télétransmis par liaison sécurisée.
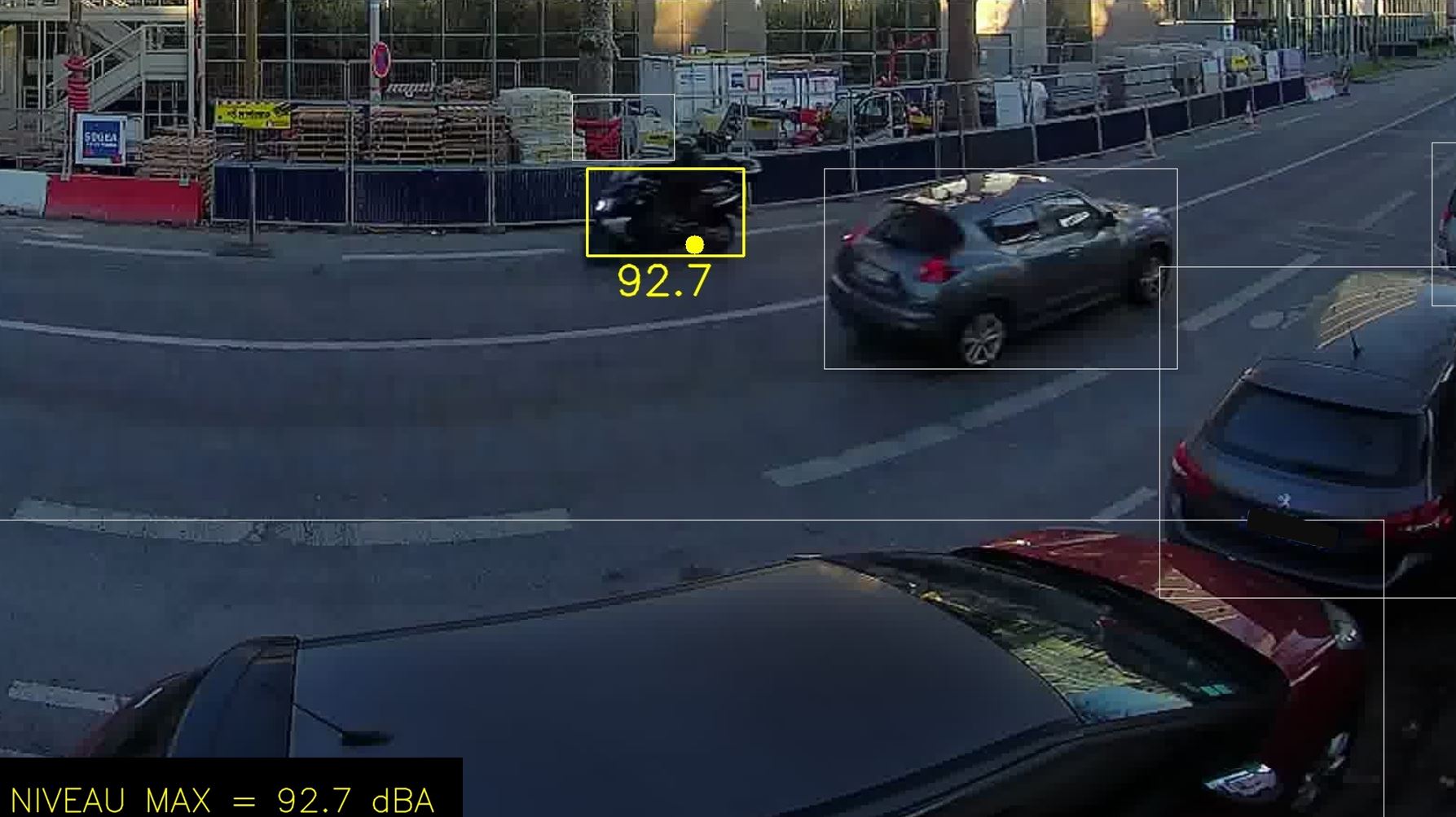
Exemple d’image de contexte qui pourra être télétransmise dans le dossier d’infraction : Ici un scooter dont le niveau de bruit maximum constaté (recalé à 7,6 m) est de 92,7 dB(A)
Résultats de la phase 1 de l’expérimentation nationale
Entre janvier 2022 et octobre 2022, s’est déroulée la phase 1 de l’expérimentation nationale. Il s’agissait d’éprouver le fonctionnement des systèmes dans les conditions réelles de circulation mais sans constatation d’infraction ni verbalisation à ce stade.
À l’issue de cette première phase, Bruitparif juge les résultats obtenus avec sa technologie très encourageants, notamment du fait qu’il est possible pour Hydre de détecter les véhicules excessivement bruyants dans une zone d’environ 15 mètres de part et d’autre du radar, et ce, même dans une scène complexe avec plusieurs véhicules présents simultanément.
Ainsi, durant la période de test, Hydre a été capable de détecter, selon les sites et leur volume de trafic, entre 10 et 44 véhicules en moyenne par jour qui ont émis un bruit au passage supérieur au seuil de détection de 83 dB(A) qui avait été fixé pour cette première phase d’expérimentation. Parmi ces véhicules, on compte de l’ordre de deux-tiers de véhicules de type deux-roues motorisés.
Avec le seuil de 85 dB(A) retenu pour la verbalisation (cf. arrêté du 7 juillet 2023) et la tolérance qui sera intégrée pour tenir compte de l’incertitude de mesure, on peut s’attendre à ce que de l’ordre de 5 à 15 véhicules en moyenne par jour puissent être verbalisés par site équipé d’un tel radar sonore.
Expérimentation du radar sonore HYDRE en europe
Le prototype de radar sonore Hydre a également été éprouvé sur le terrain au sein d’autres villes européennes : Berlin, Genève, Bâle, Bruxelles et Barcelone.
Un rapport d’évaluation a notamment été produit par l’Office fédéral suisse de l’environnement indiquant que « Les tests effectués à Genève sur quatre tronçons routiers montrent que le système « Hydre » est techniquement adapté pour détecter et mesurer les niveaux de bruit excessifs (niveaux de pointe lors des passages des véhicules), ainsi que pour identifier les véhicules bruyants ».
Lien de téléchargement du rapport de l’OFEV concernant les essais d’Hydre à Genève :
HYDRE PRIMÉ aux dÉcibels d’OR
Le radar sonore Hydre a par ailleurs été primé en 2024 lors du concours des Décibels d’Or organisé par le Conseil National du Bruit (CNB), dans la catégorie Recherche.

Robin Reda, Président du Conseil national du bruit (au centre), en présence de Cédric Bourillet, Directeur général de la prévention des risques (à droite) remet un trophée à Bruitparif (Olivier Blond, Président de Bruitparif et Christophe Mietlicki, inventeur de la solution) pour l’innovation du radar sonore Hydre. (Crédit photo : Olivier Ouadah pour le CIDB)